组装一架满足编队需求的飞机¶
系统需求¶
无人机¶
1.使用Pixhawk作为其飞行控制器的无人机。
2.一个微型车载Linux计算机。(例如:树莓派)
3.带有USB适配器的XBee模块。(例如:XBee S1, XBee S2C,等等)
4.(可选)用于调试的USB- ttl适配器(例如FT232, CP2102/CP2104,不使用PL2303) 示例:XBee模块通过USB连接到RPi, RPi通过UART连接到Pixhawk。在Rpi上配置硬件UART,使其运行在921600bps 波特率,与Pixhawk系列的设置一致。(http://ardupilot.org/dev/docs/partner-computers.html)

一个四轴飞行器的构成:¶
- 四轴机架 X1(必须)
- 动力马达 X4 (必须)
- 无刷电子调速器(电调/ESC)X4 (必须)
- PixhACK v3 飞控 X1 (必须)
- CUAV GPS X1 (必须)
- 无线数传 (CUAV RADIO/XBEE/XTEND/HACKLINK/WP-LINK) X1对 (必须)
- 动力电池(必须)
- RC遥控器和RC接收机(必须)
- 无刷云台或者相机(可选)
- 超声波或者激光传感器(可选)
- 光流定点传感器(可选)


支持电池类型¶
使用标配的CUAV IV模块,支持标准2-6V动力电池
IV模块支持2-6V电压、0-60A电流 实时监测
理论上:
需要实时控制能飞行的高度和距离:跟动力续航时间、遥控器或者数传通讯距离有关
自主飞行的高度和距离:跟动力、续航时间有关
PixHack飞控板设备接线定义¶
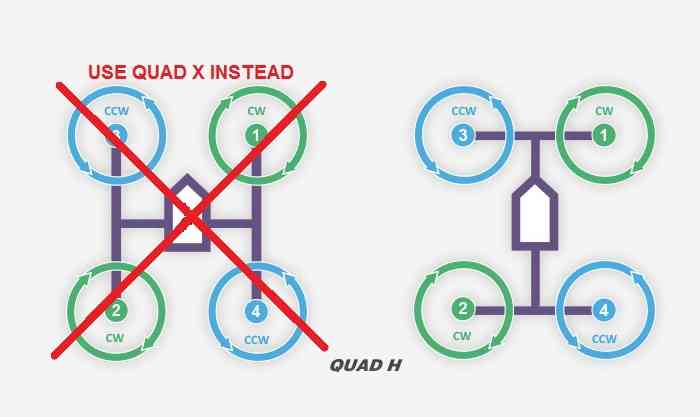
每种飞行器的电动机顺序 (里边的数字对应的飞控板的PWM输出端口)
CW 顺时针螺旋桨,绿色图示
CCW逆时针螺旋桨 ,蓝色图示
注意:错误的接线和固件,都会导致起飞就翻车,或者严重往一边倾斜,需要谨慎安装和选择固件


软件及嵌入式系统配置¶
飞控的Telem2接口与RaspberryPI的UART通过3-pin twisted cable连接,RaspberryPI与XBee(本项目采用XBee pro s1)通过USB cable相连。为了使三者能够正常通信,须按照以下步骤进行配置。
RaspberryPI配置参考¶
1. 树莓派操作系统(注:本项目采用带有图形界面的Ubuntu MATE 16.04 for RaspberryPI 3B,其他的OS配置方法可能不同)¶
- SD卡格式化软件SD Formatter 4.0 for SD/SDHC/SDXC
- 系统镜像文件在Ubuntu mate官网上下载,写入SD卡的软件Win32 Disk Imager
- 安装操作系统时,勾选开机自动登录。(实现auto-login)
- 操作系统安装完成以后,下载文本编辑器gedit,方便后续更改配置文件。 sudo apt install gedit
2. 将UART启用为communication interface。¶
- sudo gedit /boot/cmdline.text
- 删除语句‘console=serial0,115200’保存并退出。
3.修改UART配置,关闭蓝牙(注:mate系统默认蓝牙占用UART)¶
- sudo gedit /boot/config.txt
- 修改init_uart_clock to 16MHz以及init_uart_baudrate to 921600并删除语句前面的注释符号#。(注:飞控Telem2波特率也要相应地修改为921600)
- 在文本下面添加语句‘core_freq = 250’
- 在文本下面添加语句‘dtoverlay=pi3-disable-bt’保存并退出
- sudo systemctl disable hciuart sudo reboot
重启后UART配置完成
4. 安装Python包和Linux包。(注:mate系统自带python 2.7环境)¶
- sudo apt install python-pip python-dev sudo pip install pip dronekit xbee numpy gps pyzmq –-upgrade
- sudo apt install python-serial
5. 开启ssh。¶
- sudo apt install openssh-server openssh-client
- sudo raspi-cofig
- 出现配置界面,选择‘network’。
- 选择‘ssh enabled’。 ### 6. 设置开机自启程序。(确保auto-login已实现)
- sudo gedit /etc/rc.local
- 在文件中添加 cd /AmazeFly python onboard.py -xbee /dev/ttyUSB –pix /dev/ttyAMA0,保存退出
编队程序解析¶
1. 介绍¶
AmazeFly的无人机采用Pixhawk和ArduPilot堆栈作为它们的低级飞行控制器,并使用dronekit-python作为高级应用程序控制。到目前为止还没有在Pixhawk和ArduPilot级别进行修改,所以这个项目完全是用Python编写的,运行在Linux环境下(例如Raspberry Pi)。
AMazeFly的无人机使用XBee模块在无人机和地面控制站之间建立高层通信网络。
1.1 引用¶
Quan Yuan,Flydan项目(https://github.com/WeskerYuan/flydan)
1.2 许可¶
AmazeFly项目是Apache 2.0下提供的开源许可。
1.3 编码规范¶
项目完全是按照谷歌Python风格指南的约定用Python 2.7编写的。
2. 项目的主要组成部分¶
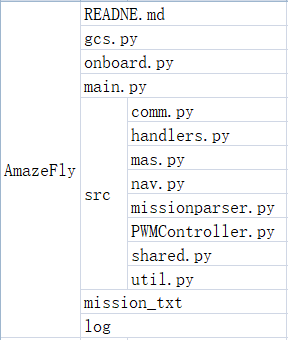
1.gcs.py:
用于四轴飞行器集群控制实验的地面控制站脚本。
该脚本在装有Linux 的笔记本电脑上运行。该过程应连接一个高级XBee模块,用于无人机和地面控制站之间的相互通信。XBee模块运行在API2,转义字符模式。在编写时,应使用XBee Pro S1模块(使用DIJI Mesh固件)。有关更多详细信息,请参阅DIJI官方网站和数据表。目前,dronekit API包支持Python 2.7。然而,Ubuntu是更好的选择,因为它使用‘apt’方式来获得分布式包。
2.onboard.py:
这是四轴飞行器集群控制实验的主要脚本。
该脚本在板载配套计算机(例如Raspberry Pi)上运行。与此同时, 控制通过USB或串行连接,按照MAVLink协议执行。无人驾驶飞机和地面控制站之间,应连接高级XBee模块以进行相互通信。XBee模块在API2,转义字符模式下运行。在编写时,应使用XBee Pro S1模块(使用DIJI Mesh固件)。有关更多详细信息,请参阅DIJI官方网站和数据表。目前,dronekit API包支持Python 2.7。然而,Ubuntu是更好的选择,因为它使用‘apt’方式来获得分布式包。
3.comm.py:
通信的类和函数。
该模块包含用于车辆或车辆和GCS之间通信的类和函数。通常,使用XBee模块让车辆交换信息。
4.mas.py:
多代理系统控制算法模块。
此模块包含高级代理系统控制的类和函数。这有两种主要的集群控制算法: 2014年COLLMOT的自动推进算法和2016年的RCSNS的分散式模型预测控制。
5.nav.py:
导航功能。
该模块包含基本的直升机导航功能,这些功能大部分处于GUIDED模式。这些代码是参考Dronekit组编写的导航功能,借鉴修改来的。
6.shared.py:
跨文件共享的模块。
该模块包含许多不同的全局共享文件功能。它们是常量或预定义对象,具体取决于具体情况。某些属性在程序启动时被加载或实例化,并且在整个运行过程中都认为是常量。详细说明请参阅源代码注释。
7.util.py:
实用功能。
该模块具有几个有用的功能,便于矢量计算和数据日志记录。大多数函数可以直接使用而不需要其他模块。
8.missionparser.py:
上传任务。
9.PWMController.py:
打开或关闭无人机上的LED。
Mission_txt: 存放任务的目录。
4. 如何使用¶
1. 建立一个飞行任务:¶
软件:APM Planner 2.0
步骤:
(1)运行该软件。
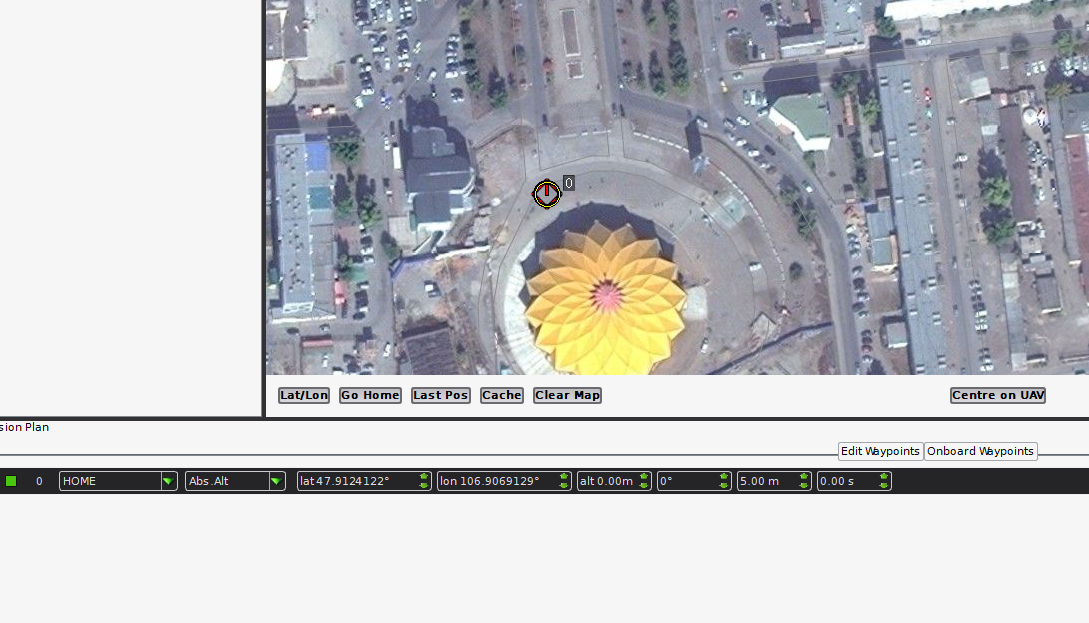
(2)单击“FLIGHT PLAN”。

(3)双击地图上的一个点(编号为0)作为“飞行原点”。
(4)双击地图上的第二点(编号为1)作为“起飞点”。
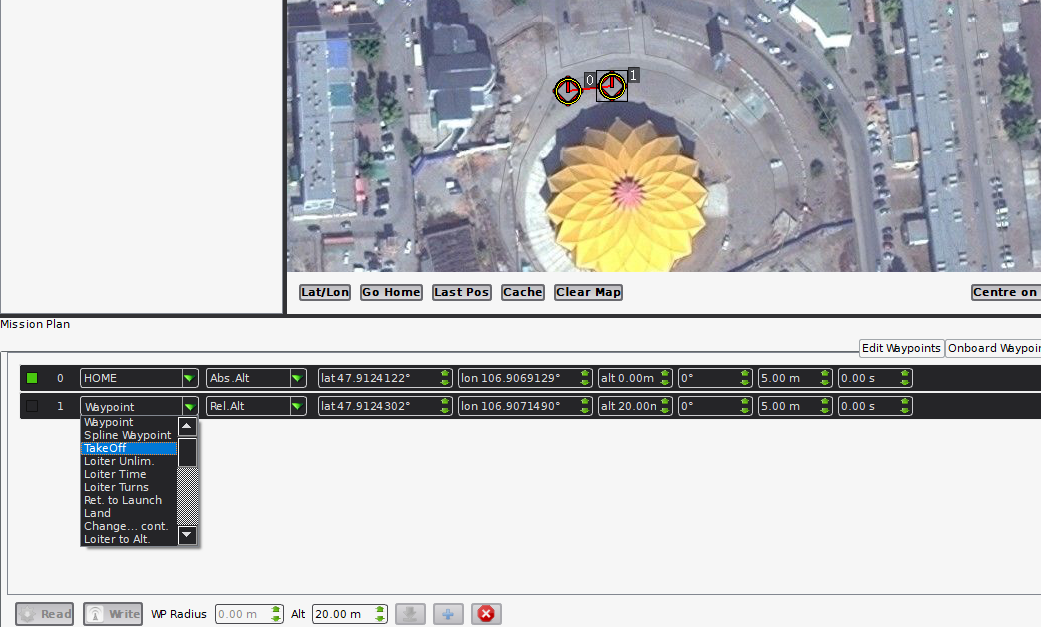
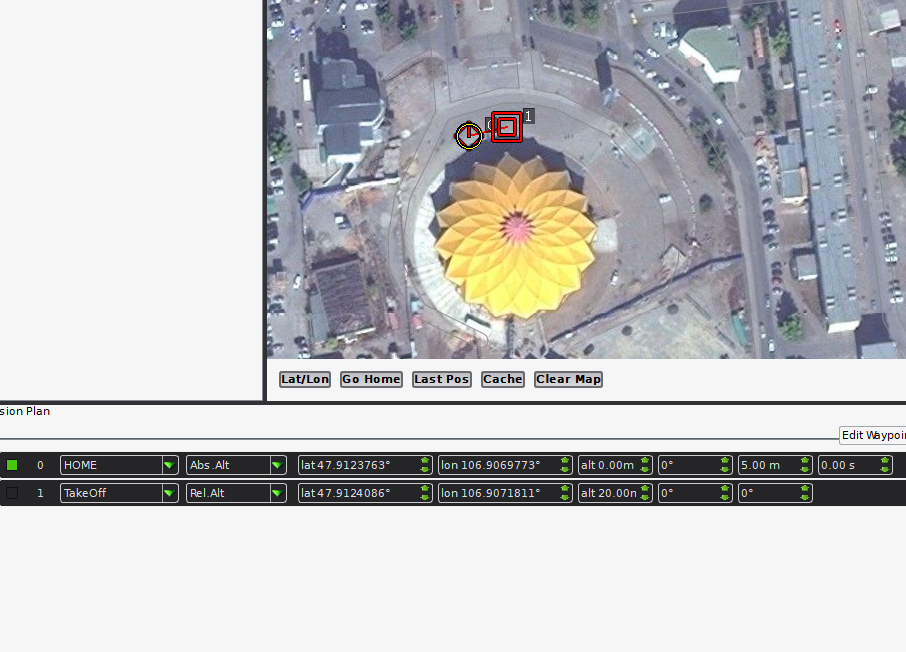
(5)继续双击一些点作为路径点。
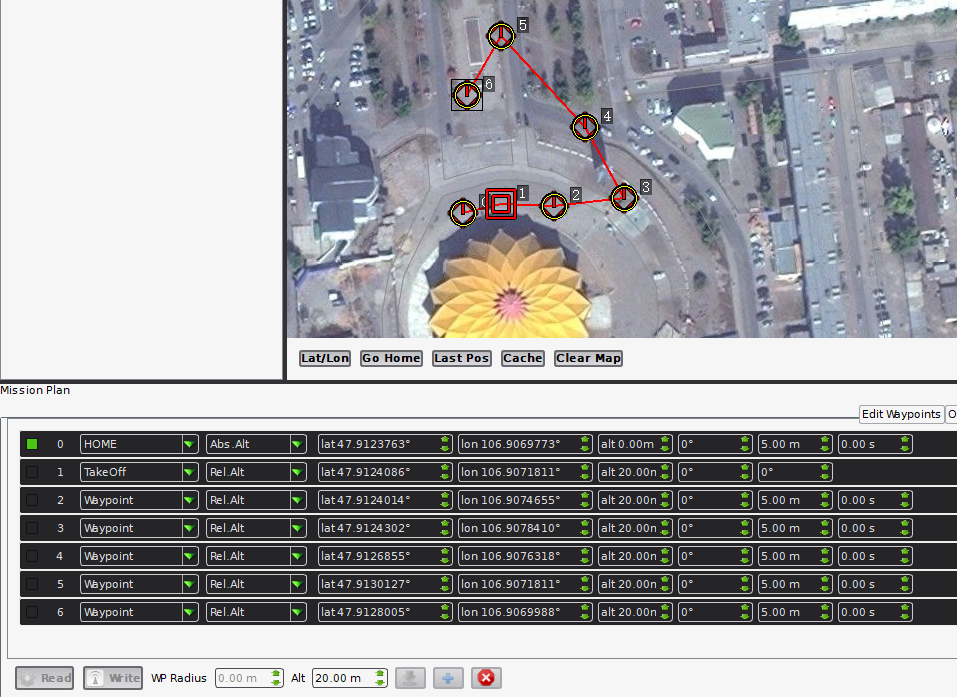
(6)可以在页面下方更改点的高度、精确度和标题。
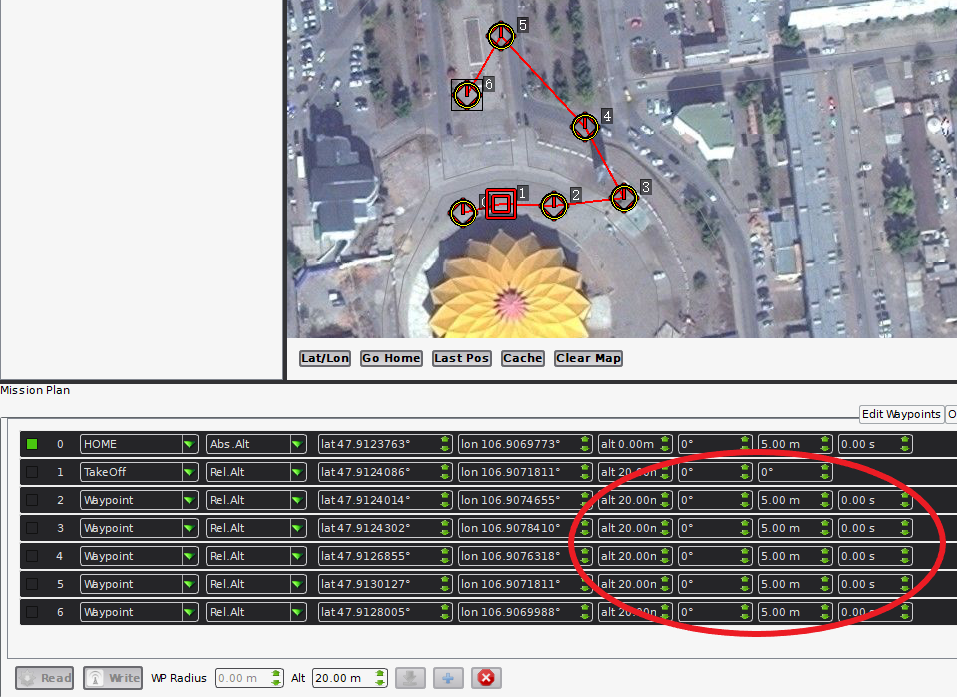
(7)将生成的TXT文件复制到mission_txt目录中,并按照无人机的序号进行划分。(TXT文件的名称必须是’FIRST .txt’、’SECOND.txt’或’THIRD.txt’。)
2. 运行’onboard.py’文件:¶
‘onboard.py’脚本会在无人机启动时自动运行。
3. 通过’gcs.py’控制无人机¶
(1)打开Linux。
(2)将Xbee模块连接到Linux计算机。
(3)运行终端。
(4)使用’cd’命令切换到项目目录。
(5)通过’ sudo python gcs.py -xbee /dev/ttyUSB0 ‘运行的’gcs.py’。使用’–help’或参考源代码的文档字符串以获得详细的脚本参数。
(6)控制台将开始提示一些信息。相应地输入字母以执行特定的操作。
Keylist:
'x': 0, # switch the mode to auto
'1': 1, # the first mission
'2': 2, # the second mission
'3': 3, # the third mission
'l': 4, # landed
'd': 5, # turn on the LED
'k': 6, # kill thread and restart
正常起飞顺序应该是:
1).按“1”/“2”/“3”,选择第一/第二/第三个任务。
2).按“x”键,切换到自动模式并起飞。
3).按“d”键,打开LED灯。
4).按“l ”键,直接降落无人机。
5).按“k”键,关闭线程并重新启动。